Yazı dizimizin bir önceki bölümünde numpy kullanımına basit bir giriş yapmıştık, şimdi ise daha ileri matematiksel yöntemleri içeren scipy‘a bir göz atalım. Yapmaya çalıştığımız “ivmenin nümerik integrasyonu” işi, aslında bir “ikinci derece diferansiyel denklem çözümü” ile eşdeğer. Konumun zamana göre ikinci türevi olan ivme diferansiyel denklemini analitik olarak çözebilseydik, konum ve hız vektörlerinin geçmiş ve gelecekteki tüm değerlerini bulabilirdik. Lakin bunu analitik olarak çözmeye hiç niyetimiz yok – işi bilgisayar yapabilecekken biz niye uğraşalım ki?
scipy bu tür diferansiyel denklemleri çözmek için bize integrate paketi altında solve_ivp adlı kütüphaneyi sunuyor. Bu kütüphane altındaki metodlarla diferansiyel denklemleri sayısal olarak kolayca çözebiliriz. Ancak öncelikle denklemleri bu yöntemlerin anlayacağı halde yazmamız gerek, diğer bir deyişle ikinci derece diferansiyel denklemi iki tane birinci derece diferansiyel denklem haline getirmemiz gerekiyor. Öncelikle kullanacağımız ara değişkenleri belirleyelim:
$ \vec{y_1} = \frac{d\vec{r}}{dt} = \dot{\vec{r}} $
$ \vec{y_2} = \vec{r} $
Şimdi de ikinci derece diferansiyel denklemimizi bu yeni değişkenler cinsinden yazalım:
$ \dot{\vec{y_2}} = \frac{d\vec{y_2}}{dt} = \vec{y_1} $
$ \dot{\vec{y_1}} = \frac{d\vec{y_1}}{dt} = – \frac{\mu}{(y_2)^3} \vec{y_2} $
Böylece ikinci derece diferansiyel denklemimiz iki tane birinci derece diferansiyel denkleme indirgendi ve scipy‘ın çözebileceği hale geldi.
Yukarıda olan biteni kod halinde yazmak zor değil:
In [25]:
from scipy.integrate import solve_ivp
def odeDiffDenklem(t, y, mu=muDünya):
"""
İki cisim problemi için diferansiyel denklem setini tanımlar.
Arguments:
t {float} -- başlangıç zamanı (s)
y {ndarray} -- konum (m) ve hızı (m/s) içeren 1B, 4 elemanlı vektör [r_x r_y v_x v_y]
Returns:
{ndarray} -- konum ve hız diferansiyel denklemlerini (hız (m/s) ve ivmeyi(m/s^2)) içeren
1B, 4 elemanlı vektör [v_x v_y a_x a_y]
"""
r = np.sqrt(y[0]**2 + y[1]**2)
dy0 = y[2]
dy1 = y[3]
dy2 = -(mu / (r**3)) * y[0]
dy3 = -(mu / (r**3)) * y[1]
return [dy0, dy1, dy2, dy3]
odeDiffDenklem zaman ile konum-hız vektörünü alıyor (aslında yerçekimi ivmesini de alıyor ama maalesef henüz yeni çıkmış olan solve_ivp paketi bu değerin dışarıdan atanmasını kabul etmiyor).
Yukarıdaki metodla tanımlanan diferansiyel denklem setini çözen kod da zor görünüyor, ama aslında değil:
In [26]:
def odeÇözümü(pvt0, tAdım, tSon, çözücüTipi = 'RK45'):
"""
Scipy ODE sayısal integrasyon metodlarıyla konum ve hız değerleri listesini hesaplar.
Arguments:
tAdım {float} -- adım büyüklüğü (s)
pvt0 {ZamanKonumHız} -- başlangıç zamanında zaman konum hız
tSon {float} -- bitiş zamanı (s)
çözücüTipi {string} -- ODE çözücüsünün tipi ('RK45', 'RK23', 'Radau', 'BDF', 'LSODA')
Returns:
list {ZamanKonumHız} -- her bir zaman adımı için zaman konum hız değerlerini içeren liste
"""
# adımSayısı ve zaman listesini oluştur
adımSayısı = (tSon-pvt0.t)/tAdım + 1
zamanListesi = np.asarray(np.linspace(pvt0.t, tSon, num = adımSayısı, endpoint=True))
# diff denklem başlangıç değerlerini oluştur
diffIlkDeğer = np.asarray(np.concatenate([pvt0.r, pvt0.v]))
# diff denklemi başlangıç zamanından son zamana dek çöz
diffDenkÇözüm = solve_ivp(odeDiffDenklem, [pvt0.t, tSon], diffIlkDeğer, method=çözücüTipi, dense_output=True)
# zaman listesine karşılık gelen değerleri oluştur
cozumListesi = diffDenkÇözüm.sol.__call__(zamanListesi)
# sonuç listesini başlat
numPvtList = []
# Listeyi objelere dönştür
for i in range(len(zamanListesi)):
pvArray = cozumListesi[:, i]
numPvtList.append( ZamanKonumHız(zamanListesi[i], pvArray[0], pvArray[1], pvArray[2], pvArray[3]) )
return (numPvtList)
odeÇözümü, başlangıç ZamanKonumHız nesnesini, adım büyüklüğünü ve son zaman adımını alıyor. Buraya kadarki kısmı Euler ile benzer. Ancak buna ek olarak kullanılacak diferansiyel denklem çözüm yöntemini de alıyor. Varsayılan değer olan RK45, 4. derece bir çözücü kullanarak adım büyüklüğünü belirleyen ama asıl çözüm için 5. derece kullanan bir Adaptif Runge-Kutta yöntemi. Çok profesyonel olmasa da birçok öğrencinin projelerinde iş görecek bir diferansiyel denklem çözücüsü. Bu yöntem, hatayı belli bir seviyenin altında tutacak şekilde kendi adım büyüklüğünü belirleyecek kadar da akıllı. Ancak biz her tAdım değerinde bir çıktı almak istiyoruz. Bu nedenle, tAdım aralıkla çıktı alınacak zamanların bir listesini oluşturuyoruz.
solve_ivp satırı aslında denklem setinin çözüldüğü satır – bir döngü bile yok, her şey sessiz sedasız içeride hallediliyor. Bu çözücüye diferansiyel denklem setini içeren metodu, başlangıç ve bitiş zamanlarını, ilk konum ve hızı ve çözücü tipini yolluyoruz. Bir sonraki adımda ise zaman listesine karşılık gelen ara çözümleri oluşturuyoruz. Biz diffDenkÇözüm.sol.__call__(zamanListesi) komutunu yazdığımızda arka tarafta interpolasyon algoritmaları bizim istediğimiz zamanlara karşılık gelen noktaları oluşturuyor. Son kısımda ise elde ettiğimiz bu çözüm setini ZamanKonumHız nesnelerine dolduruyoruz.
Sadece bu iki satır ile, oturup yazmaya üşeneceğimiz (benzerlerini yazdım, oradan biliyorum), yüzlerce satırlık koda karşılık gelen işlevselliği kolaylıkla elde edebiliyoruz. scipy sayesinde elbette!
O halde bunları çağırarak problemi çözen koda bakalım:
In [27]:
# başlangıç zamanı
t0 = 0
# bitiş zamanı (sn)
tSon = 6000
# adım büyüklüğü (sn)
tAdımEuler_1 = 5
tAdımEuler_2 = 1
tAdımODE = 60
çözücüTipi = 'RK23'
# başlangıç konum ve hız
pvt0 = ZamanKonumHız(t0, 0, 7000*1E3, 7.5*1E3, 0)
# Euler sayısal integrasyon verisini hesaplayan döngüyü çalıştır
eulPvtList5 = hesapDöngüsüEuler(pvt0, tAdımEuler_1, tSon)
eulPvtList1 = hesapDöngüsüEuler(pvt0, tAdımEuler_2, tSon)
çözücüPvtList = odeÇözümü(pvt0, tAdımODE, tSon, çözücüTipi)
/home/sonsuz/anaconda3/lib/python3.6/site-packages/ipykernel_launcher.py:18: DeprecationWarning: object of type <class 'float'> cannot be safely interpreted as an integer.
Diferansiyel denklem çözücüsü için 60 saniyelik bir çıktı adım büyüklüğü kullandık, ama bu seferlik kullanacağımız 3. derece Runge-Kutta (RK23) yönteminde de hesaplamalarda kullanılan adım büyüklüğü otomatik olarak, integrasyon algoritması tarafından belirleniyor. Bakalım RK23 kullanarak bulduğumuz sonuçlar küçük adımlara sahip Euler yöntemlerinden daha mı iyi çıkacak?
Bu sorunun yanıtı için grafikleri oluşturmamız gerek:
In [28]:
# konum grafiği
plt.plot( [pvt.r[0] for pvt in çözücüPvtList], [pvt.r[1] for pvt in çözücüPvtList], label=çözücüTipi + " (" + str(tAdımODE) + " s)")
plt.title("Konum")
plt.xlabel("x konum (m)")
plt.ylabel('y konum (m)')
plt.axes().set_aspect('equal')
plt.grid(b=True, which='major', linestyle='--')
plt.show()
# hız grafiği
plt.plot( [pvt.v[0] for pvt in çözücüPvtList], [pvt.v[1] for pvt in çözücüPvtList], label=çözücüTipi + " (" + str(tAdımODE) + " s)")
plt.title("Hız")
plt.xlabel("x hız (m/s)")
plt.ylabel("y hız (m/s)")
plt.axes().set_aspect('equal')
plt.grid(b=True, which='major', linestyle='--')
plt.show()
# enerji grafikleri
#referans değer - tüm farklar bu değere göre hesaplanacak
spEnerjiRef = pvt0.spesifikEnerji()
plt.title("Spesifik Enerji Değişimi")
plt.xlabel("zaman (s)")
plt.ylabel("spesifik enerji ($m^2/s^2$)")
plt.yscale('log')
plt.plot( [pvt.t for pvt in eulPvtList1], [np.abs(pvt.spesifikEnerji()-spEnerjiRef) for pvt in eulPvtList1], label="Euler (" + str(tAdımEuler_2) + " s)")
plt.plot( [pvt.t for pvt in eulPvtList5], [np.abs(pvt.spesifikEnerji()-spEnerjiRef) for pvt in eulPvtList5], label="Euler (" + str(tAdımEuler_1) + " s)")
plt.plot( [pvt.t for pvt in çözücüPvtList], [np.abs(pvt.spesifikEnerji()-spEnerjiRef) for pvt in çözücüPvtList], label=çözücüTipi + " (" + str(tAdımODE) + " s)")
plt.legend(loc=4)
plt.show()
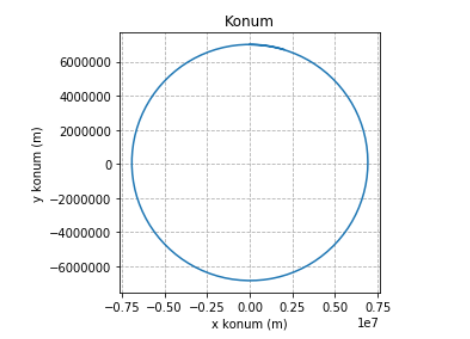

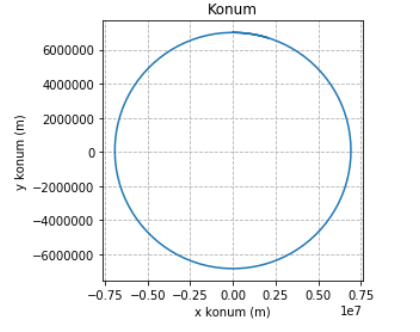
Öncelikle konum ve hız grafiklerini göstermek için kullandığımız RK23’ün hiç fena performans göstermediği anlaşılıyor – başladığımız yere iyi kötü dönmeyi başarmışız.
Yöntemler arasındaki uçurum nedeniyle enerji değişim grafiğini log ölçeğinde çizdirdik, aslında tüm yöntemler için artış lineer. Log kısmını kapatıp bunu siz de görebilirsiniz. Enerji grafiklerine bakınca, RK23‘ün, 1 saniye adım büyüklüğüne sahip Euler’in sadece onda biri kadar enerji hatası yaptığı görülüyor. Yani scipy‘ın yöntemleri bizim uzun uzadıya yazdığımız kodlardan çok daha iyi sonuç veriyor. Çıkarılacak sonuç çok açık, tekerleği yeniden keşfetmenin ve sıfırdan denklem çözücü yazmanın gereği yok – tabii scipy‘ın sunduklarından daha iyi algoritmalar kullanmak durumundaysanız iş başka.
Yazdığımız odeÇözümü metodunda pek hoş olmayan bir kısım var: metoda çözücü adını string olarak yolluyoruz. Ancak kafamıza göre bir string değeri yollamamız mümkün değil, zira solve_ivp tarafından kabul edilen sadece birkaç çözücü var. Bu yöntem bizi hataya fazlasıyla açık hale getiriyor. Bunu çözmenin pratik bir yolu enumerator adı verilen mini mini veri depoları. Öncelikle enum içinde olası tüm değerleri (yani integrasyon algoritması tiplerini) belirliyoruz. Örneğin adı, yani çözücüTipi.name değeri RADAU olan bir parametremiz var. Bunun çözücüTipi.value ile sorgulanan değeri ‘Radau’ ile ifade edilen string. Böylece parametre adları ve buna karşılık gelen değerlerden mini bir tablo oluşturmuş oluyoruz.
In [29]:
from enum import Enum
class ODEÇözücüTipi(Enum):
"""
solve_ivp integrasyon tipleri
"""
RK45 = 'RK45'
RK23 = 'RK23'
RADAU = 'Radau'
BDF = 'BDF'
LSODA = 'LSODA'
Bir sonraki adımda da odeÇözümü metodunda buna uygun küçük bir değişiklik yapıyoruz – metodumuzun kullanıcısını yukarıda belirlediğimiz tablodaki parametreler arasında bir tercih yapmaya zorluyoruz.
In [30]:
def odeÇözümü(pvt0, tAdım, tSon, çözücüTipi = ODEÇözücüTipi.RK45):
"""
Scipy ODE sayısal integrasyon metodlarıyla konum ve hız değerleri listesini hesaplar.
Arguments:
tAdım {float} -- adım büyüklüğü (s)
pvt0 {ZamanKonumHız} -- başlangıç zamanında zaman konum hız
tSon {float} -- bitiş zamanı (s)
çözücüTipi {ODEÇözücüTipi} -- ODE Çözücü Tipi
Returns:
list {ZamanKonumHız} -- her bir zaman adımı için zaman konum hız değerlerini içeren liste
"""
# adımSayısı ve zaman listesini oluştur
adımSayısı = (tSon-pvt0.t)/tAdım + 1
zamanListesi = np.asarray(np.linspace(pvt0.t, tSon, num = adımSayısı, endpoint=True))
# diff denklem başlangıç değerlerini oluştur
diffIlkDeğer = np.asarray(np.concatenate([pvt0.r, pvt0.v]))
# diff denklemi başlangıç zamanından son zamana dek çöz
diffDenkÇözüm = solve_ivp(odeDiffDenklem, [pvt0.t, tSon], diffIlkDeğer, method=çözücüTipi.value,
dense_output=True, rtol = 1e-12, atol = 1e-15)
# zaman listesine karşılık gelen değerleri oluştur
cozumListesi = diffDenkÇözüm.sol.__call__(zamanListesi)
# sonuç listesini başlat
numPvtList = []
# Listeyi objelere dönştür
for i in range(len(zamanListesi)):
pvArray = cozumListesi[:, i]
numPvtList.append( ZamanKonumHız(zamanListesi[i], pvArray[0], pvArray[1], pvArray[2], pvArray[3]) )
return (numPvtList)
Burada bir değişiklik daha yaptık ve solve_ivp‘yi çağırırken method=çözücüTipi.value, dense_output=True, rtol = 1e-12, atol = 1e-15 parametre setini de ekledik. Bu üçlünün detaylarına girmeyeceğim, ama sadece hata kontrolünün burada yapıldığını söylemekle yetineyim. Yani buradaki rtol ve atol ile verilen bağıl ve mutlak tolerans değerlerini ne kadar küçük seçerseniz diferansiyel denklem çözücüsünü de o kadar hatasız ve elbette küçük adımlarla ve yavaş çalışmaya zorlarsınız. Farklı tolerans değerlerini deneyip hatanın nasıl değiştiğini kendiniz de görebilirsiniz.
Kalan kısımlarda önemli bir değişiklik yapmayacağız, sadece bu kez de RK45 adlı çözücüyü deneyip RK23 ile karşılaştıracağız. Kalan tüm değerler ve Euler ilerleticiler öncekilerle aynı olduğu için buraya eklemedim.
In [31]:
# *********** ana kod yapısı ***********
# başlangıç zamanı
t0 = 0
# bitiş zamanı (sn)
tSon = 6000
# adım büyüklüğü (sn)
tAdımEuler_1 = 5
tAdımEuler_2 = 1
tAdımODE = 60
çözücüTipi1 = ODEÇözücüTipi.RK23
çözücüTipi2 = ODEÇözücüTipi.RK45
# başlangıç konum ve hız
pvt0 = ZamanKonumHız(t0, 0, 7000*1E3, 7.5*1E3, 0)
# Euler sayısal integrasyon verisini hesaplayan döngüyü çalıştır
eulPvtList5 = hesapDöngüsüEuler(pvt0, tAdımEuler_1, tSon)
eulPvtList1 = hesapDöngüsüEuler(pvt0, tAdımEuler_2, tSon)
çözücüPvtList1 = odeÇözümü(pvt0, tAdımODE, tSon, çözücüTipi1)
çözücüPvtList2 = odeÇözümü(pvt0, tAdımODE, tSon, çözücüTipi2)
/home/sonsuz/anaconda3/lib/python3.6/site-packages/ipykernel_launcher.py:17: DeprecationWarning: object of type <class 'float'> cannot be safely interpreted as an integer.
Son olarak, yeni diferansiyel çözücümüz RK45’in sonuçlarını görmek için grafiklere tekrar bakalım:
In [32]:
# *********** grafikler ***********
# konum grafiği
plt.plot( [pvt.r[0] for pvt in çözücüPvtList2], [pvt.r[1] for pvt in çözücüPvtList2], label=çözücüTipi2.value + " (" + str(tAdımODE) + " s)")
plt.title("Konum")
plt.xlabel("x konum (m)")
plt.ylabel('y konum (m)')
plt.axes().set_aspect('equal')
plt.grid(b=True, which='major', linestyle='--')
plt.show()
# hız grafiği
plt.plot( [pvt.v[0] for pvt in çözücüPvtList2], [pvt.v[1] for pvt in çözücüPvtList2], label=çözücüTipi2.value + " (" + str(tAdımODE) + " s)")
plt.title("Hız")
plt.xlabel("x hız (m/s)")
plt.ylabel("y hız (m/s)")
plt.axes().set_aspect('equal')
plt.grid(b=True, which='major', linestyle='--')
plt.show()
# enerji grafikleri
#referans değer - tüm farklar bu değere göre hesaplanacak
spEnerjiRef = pvt0.spesifikEnerji()
plt.title("Spesifik Enerji Değişimi")
plt.xlabel("zaman (s)")
plt.ylabel("spesifik enerji ($m^2/s^2$)")
plt.yscale('log')
plt.plot( [pvt.t for pvt in eulPvtList1], [np.abs(pvt.spesifikEnerji()-spEnerjiRef) for pvt in eulPvtList1], label="Euler (" + str(tAdımEuler_2) + " s)")
plt.plot( [pvt.t for pvt in eulPvtList5], [np.abs(pvt.spesifikEnerji()-spEnerjiRef) for pvt in eulPvtList5], label="Euler (" + str(tAdımEuler_1) + " s)")
plt.plot( [pvt.t for pvt in çözücüPvtList1], [np.abs(pvt.spesifikEnerji()-spEnerjiRef) for pvt in çözücüPvtList1], label=çözücüTipi1.value + " (" + str(tAdımODE) + " s)")
plt.plot( [pvt.t for pvt in çözücüPvtList2], [np.abs(pvt.spesifikEnerji()-spEnerjiRef) for pvt in çözücüPvtList2], label=çözücüTipi2.value + " (" + str(tAdımODE) + " s)")
plt.legend(loc=4)
plt.show()
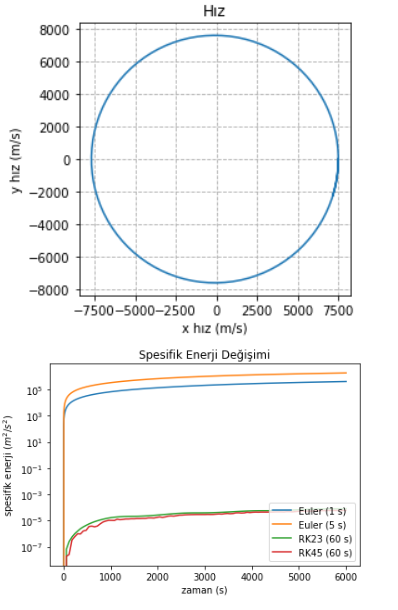
Standart bir RK23 ile geçen sefer enerjiyi 1 saniye adım büyüklüğüne sahip Euler’den 10 kat daha iyi koruduğumuzu söylemiştik. Bu kez sıkı bir adım kontrolü kullanan bir RK45 ile, Euler’e oranla enerjiyi 10,000,000,000 (10 milyar) kez daha iyi koruduk! Bu kadar iyi bir sonucu elde etmek için daha fazla kod yazmamız da gerekmedi zira scipy bize tüm bu imkanları hazır olarak sunuyor. RK23 de RK45’e yakın bir performans gösterdi, çünkü sıkı adım kontrolünü ona da uyguladık. Ancak muhtemelen otomatik seçilen adım büyüklükleri RK45’ten daha küçük kaldı; diğer bir deyişle, kullandığımız metod olan RK23, RK45’ten daha kötü olduğu için aynı performansı gösterebilmek için daha çok çalıştı. Gerçek problemlerde, kullanacağımız sayısal integrasyon metodunun seçimi kritik önem teşkil eder. Diferansiyel denklemin bir adımını çözmek için gereken hesaplama kapasitesi, problemin non-lineerliği ve ne kadar ani değişiklikler gösterdiği, problemi ne kadar uzun süre modelleyeceğimiz ile elbette doğruya ne kadar yakın sonuçlar istediğimize bağlı olarak seçeceğimiz matematiksel model değişiklik gösterir. Bu durumda, genellikle farklı modellerle uzun uzadıya performans testleri yapılarak en uygun model seçilir.
Özetle, bu örneğimizde sonundanumpy ve scipy kütüphanelerine bir başlangıç yaptık ve kod organizasyonu, işlevlerin ayrılması, kodun yeniden kullanımı gibi yazılımcılık zanaatının temel prensiplerinden bahsettik. Bu arada iki cisim gibi basit bir problemin çözümünde bile, fizik kanunları ve matematiksel modeller arasındaki ilişkinin ne kadar çetrefilli olabileceğine kısaca değindik. Son olarak ikinci derece bir diferansiyel denklemin nasıl çözülebileceğine dair de küçük bir örnek yaptık.
Yorumlar